Unlock real-world
AI Robots
High-torque, compact, simulation-ready actuators
High-torque, compact, simulation-ready actuators
Robots are crossing from research into real-world deployment. What separates success from failure is the hardware at the core: actuation. We build what makes them move.
Up to 60% of a robot's total build cost is driven by actuation. Today's solutions are not cost-optimized for series production.
Simulation fails in real-world applications. The gap between virtual training environments and physical deployment costs entire programs.
Actuators on the market don't match the real constraints of humanoid platforms - in torque density, weight, or form factor.
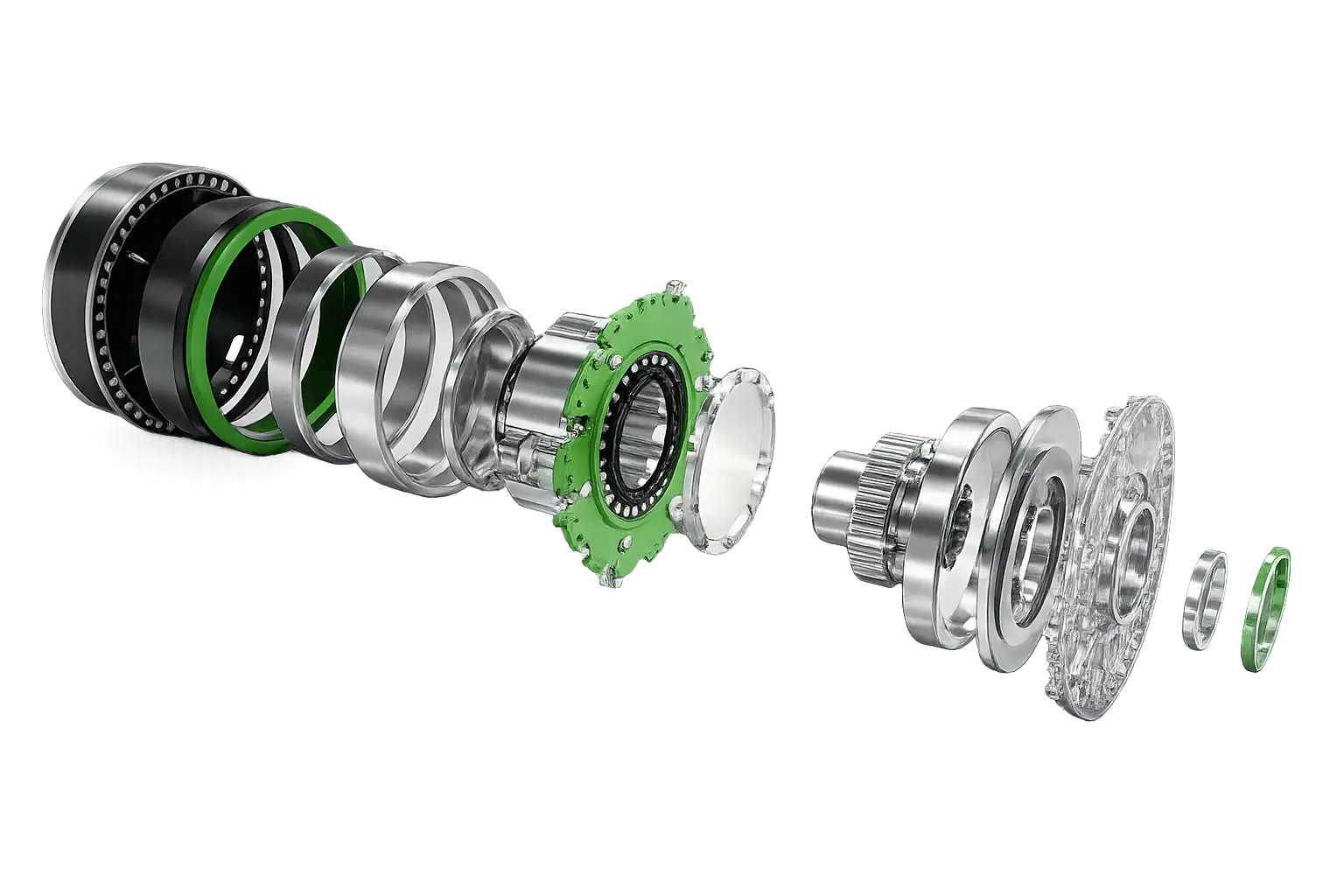
Every component is selected for durability, torque density, and integration compatibility. No shortcuts, no compromise.
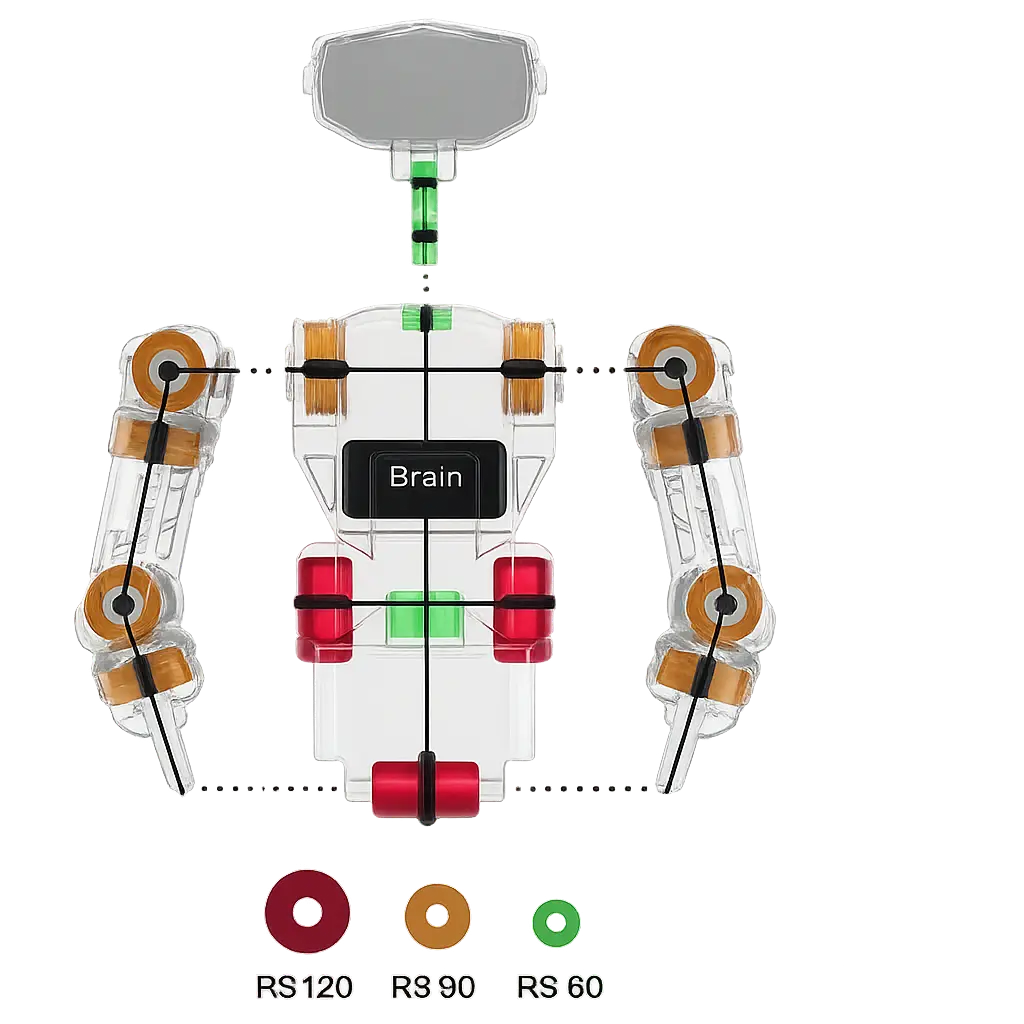
Every joint in the RS series is mapped to a specific anatomical function - optimized for load, range of motion, and space constraints.
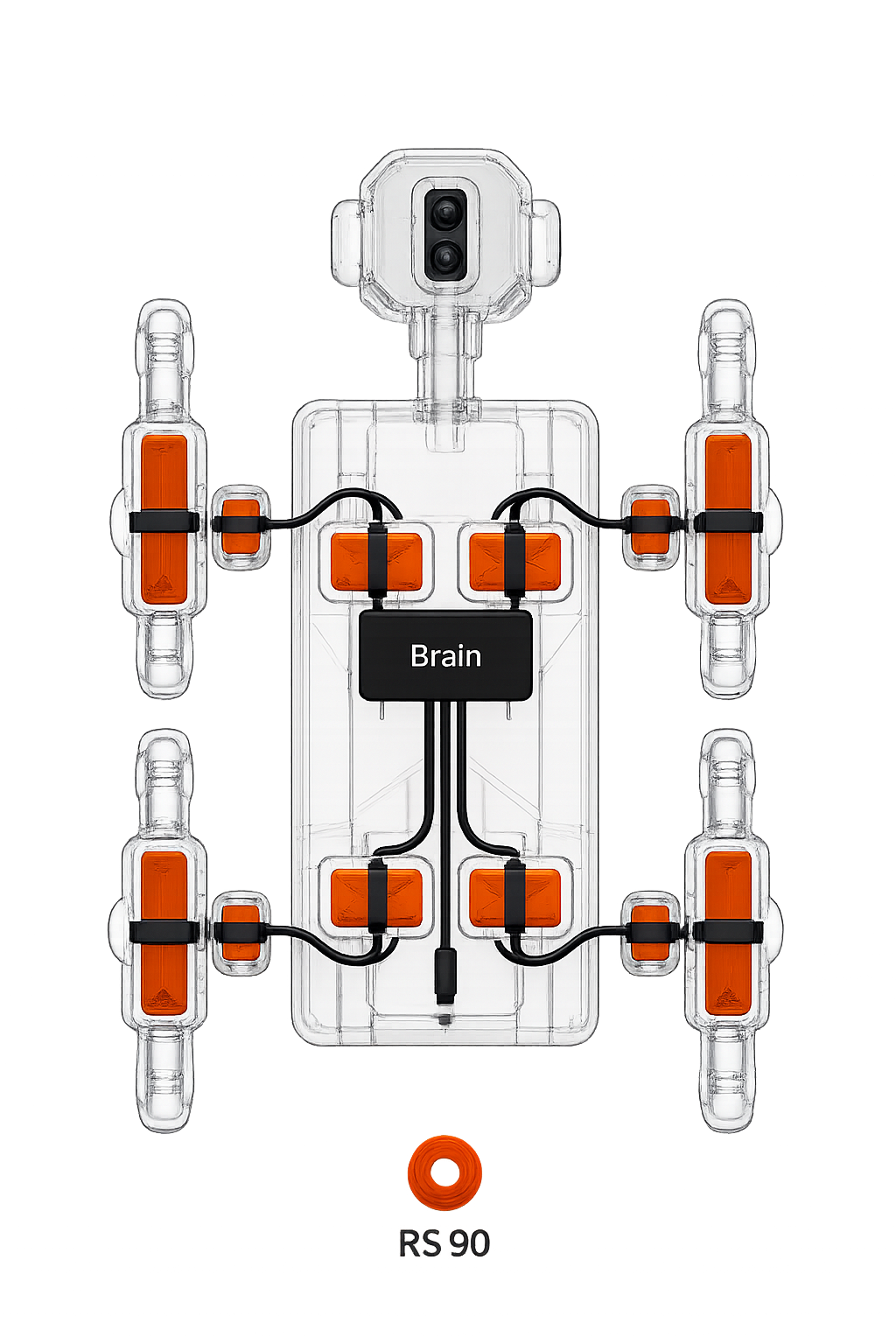
The RS90 covers every joint of a quadruped platform, from hip to ankle, delivering the torque density and backdrivability required for dynamic locomotion.
Arm · Knee · Ankle
